

- Застосування електромагнітних перетворювачів
- Моделювання лінійного електромагнітного поршня в COMSOL Multiphysics
- Моделювання електромагнітних полів в системі
- Додавання інтерфейсу Global ODEs and DAEs
- Моделювання поступального руху поршня
- Аналіз результатів розрахунку
- Заключетельние міркування з моделювання електромагнітних поршнів і перетворювачів
Наша сеть партнеров Banwar
Електромагнітний поршень - це електромеханічний пристрій, який перетворює електричну енергію в лінійне механічне рух. Прикладами можуть служити закриті електромагнітні клапани, а також закриті і відкриті електромагнітні реле. У цій замітці ми покажемо, як моделювати електромагнітний поршень і його динаміку. В даному прикладі він складається з многовитковой котушки, магнітного сердечника, немагнітних напрямних і магнітного поршня.
Застосування електромагнітних перетворювачів
Лінійні електромагнітні перетворювачі широко використовуються в промисловості в схемах, де потрібна лінійне рух. Такі пристрої знайшли широке застосування в електромагнітних реле , електромагнітних клапанах , автоматичних вимикачах і контакторах. Дані технології застосовуються в різних галузях, таких як сільське господарство, будівництво, автомобілебудування і роботобудування.
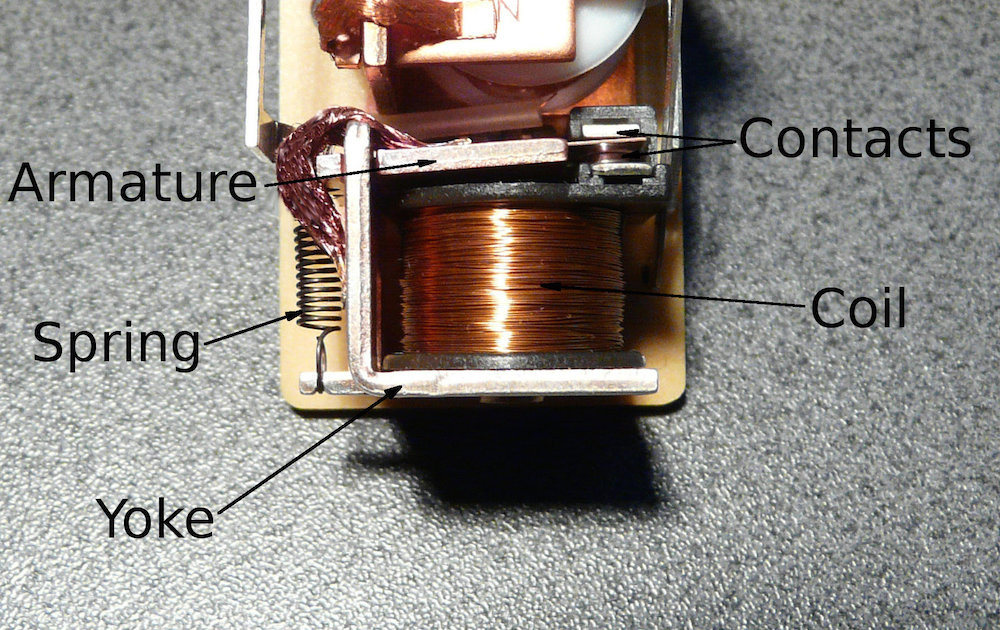
Найпростіше електромагнітне реле з механічною пружиною, котушкою, якорем і сердечником.
Програмне забезпечення COMSOL Multiphysics дозволяє проектувати лінійні електромагнітні перетворювачі. Завдяки вбудованому функціоналу можна розрахувати механічні характеристики, робочі електричні характеристики, ефективність пристрою і робочу частоту в залежності від конструкційних параметрів (розмірів, матеріалів, вхідної напруги, струму і т.д.). Приклад більш комплексного пристрою ми розглянемо в наступній частині.
Моделювання лінійного електромагнітного поршня в COMSOL Multiphysics
У цьому ж блозі ми розглянемо найпростіший Електомагнітні поршень, який складається з многовитковой котушки, магнітного сердечника, немагнітний напрямних і магнітного поршня. Як показано на малюнку нижче, ці частини з'єднуються з пружиною і демпфером. Після подачі (прямокутного імпульсу) струму на котушку соленоїда, останній створює магнітне поле навколо магнітного сердечника і поршня. Вплив магнітного поля створює силу, яка втягує поршень, рухаючи його вгору і розтискаючи пружину. При макисмально силі поршень розташовується всередині сердечника таким чином, що магнітний потік замикається з мінімальними втратами.
Тривимірний (зліва) і двомірний осесиметричних (праворуч) вид електромагнітного поршня в розрізі.
Для даної моделі Electromagnetic Plunger (Електромагнітний поршень) ми використовуємо двомірну осесиметричних постановку. Потім додамо інтерфейси Magnetic Fields (Магнітні поля), Moving Mesh (Рухома сітка) і Global ODEs and DAEs (Глобальні ОДУ і ДАУ), а також виберемо дослідження - Time Dependent (Нестаціонарне в тимчасовій області). Далі, задамо параметри моделі в Global Definitions> Parameters (Глобальні визначення> Параметри), як показано на скріншоті нижче.
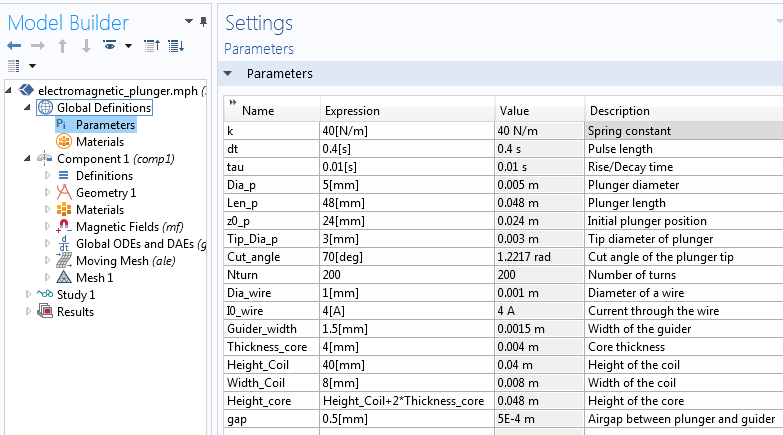
Список конструкційних параметрів для моделі електромагнітного поршня.
Для відтворення великої поступального переміщення поршня будемо використовувати "ковзаючу" сітку для моделювання руху. Для цього в вузлі Геометрія необхідно розділити рухливу і нерухому частини, створивши два різних Union (Об'єднання). Потім ми завершимо створення геометрії, використовуючи вузол Form Assembly (Побудова збірки), що призведе до автоматичного створення т.зв. тотожною пари (Identity pair) на кордоні розділу двох Union'ов. Для спрощення моделювання рекомендується додатково створити геометричні вибірки (selections) для напрямних, сердечника, котушки, поршня, вихідної кордону і кінцевої межі (тотожною пари), а також кордони для розрахунку сили, як показано на скріншоті нижче.
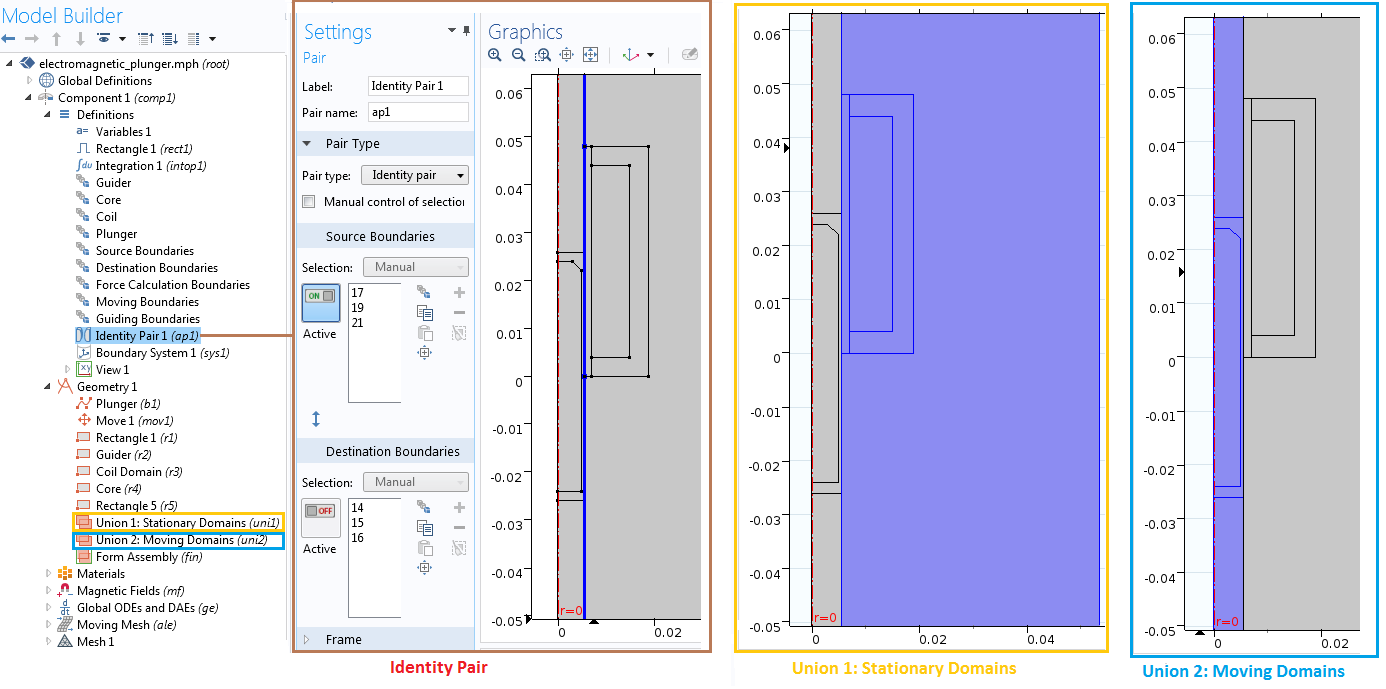
Різні геометричні вибірки для нерухомих і рухомих частин і для ідентичних пар в построителе моделей.
Щоб розрахувати масу поршня, M, яка знадобиться для дослідження динаміки системи, скористаємося оператором інтегрування, Integration 1 (intop1). Цей оператор обчислює обсяг клапана і примножує його на щільність матеріалу. В даному прикладі поршень зроблений з низьковуглецевої сталі 1002 - матеріалу з індексом (mat 3). Також потрібно визначити змінну для електромагнітної сили, F_z, яку ми будемо використовувати для розрахунку тензора напружень Максвелла, що діють на поршень. Для цього в фізичний інтерфейс Magnetic Fields необхідно додати вузол Force Calculation (Розрахунок сили) і вказати ім'я сили - force. Як це зробити ми докладно пояснимо в наступному розділі.
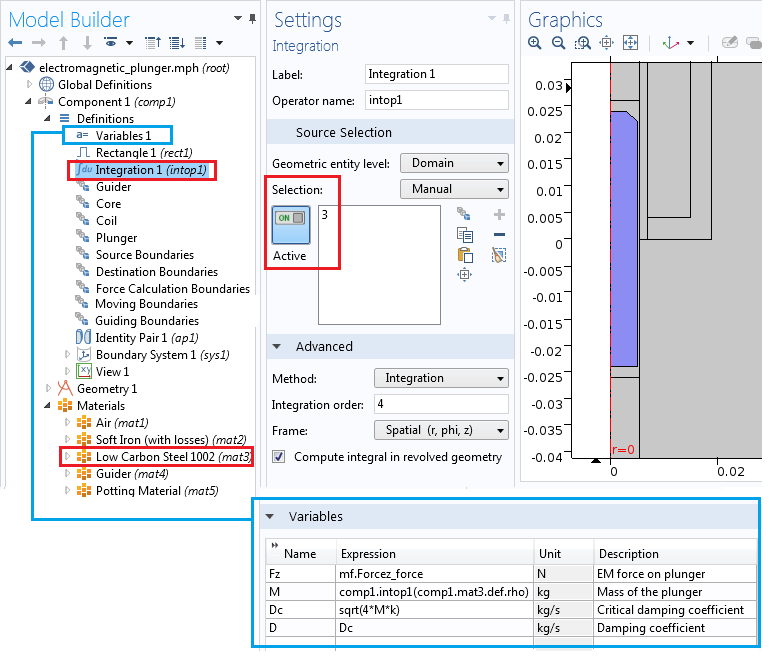
Оператор інтегрування і завдання змінних.
Моделювання електромагнітних полів в системі
Для розрахунку електромагнітних полів в нашому устрої використовуватимемо фізичний інтерфейс Magnetic Fields. Щоб вказати те, що поршень зроблений з нелінійного магнітного матеріалу, виберемо матеріальну модель HB curve (HB-крива намагнічування) в вузлі Ampère's Law (Закон Ампера), який потрібно додатково додати в інтерфейс. Для сердечника, виконаного з м'якого заліза (Soft Iron) проведемо аналогічну операцію. Зверніть увагу, що в такому випадку, маючи два різних вузла Ampère's Law, ми можемо використовувати для поршня і сердечника різні матеріальні моделі при необхідності.

Вікно налаштувань вузла Ampère's Law і HB-крива намагнічування нелінійного матеріалу поршня.
За допомогою вузла Mulit-Turn Coil (багатовитковому котушка) у фізичному інтерфейсі Magnetic Fields задамо соленоідальной обмотку (Примітка: починаючи з версії 5.2a, для цієї мети використовується вузол Coil c опцією Homogenized Multiturn). Обмотка складається з 200 витків (Nturns = 200), діаметр дроту - 1 mm (Dia_wire = 1 mm), електрична провідність - 6e7 s / m. Протікає через котушку струм задамо прямокутним імпульсом: I_coil = I0_wire * rect1 (t [1 / s]), де rect1 () - це прямокутна функція, яка визначається користувачем в Definitions> Rectangle 1. Амплітуда струму I0_wire = 4 A.
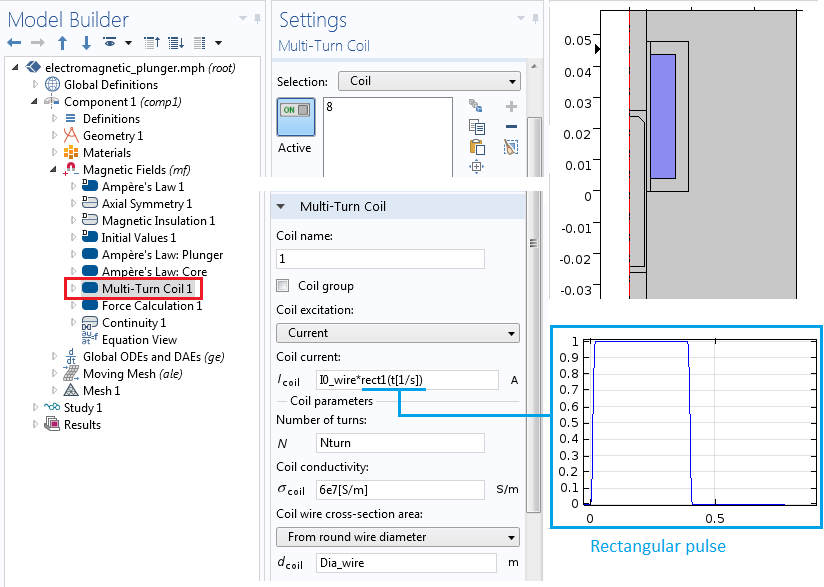
Вікно налаштувань вузла Multi-Turn Coil (багатовитковому котушка), де задані вирази для струму та параметри обмотки.
Для розрахунку сили, що діє на поршень, додамо вузол Force Calculation, який буде розраховувати силу, діючу на поршень в залежності від протекаемого струму на основі тензора напружень Максвелла. Поршень зроблений з магнітного матеріалу, тому для розрахунку ми не можемо використовувати метод розрахунку сили Лоренца, тому що він підходить тільки для провідних немагнітних матеріалів. Метод розрахунку тензора напружень Максвелла вимогливий до якості і вирішенню сітки, особливо на кордонах обраної області. Щоб коректно розрахувати силу, рекомендуємо провести дослідження по гратчастої збіжності (mesh refinement study).
Далі, щоб зв'язати магнітні поля між нерухомими і рухливими частинами, потрібно додати граничну умову Continuity (Безперервність) на відповідну тотожну пару Identity Pair.
Додавання інтерфейсу Global ODEs and DAEs
Щоб описати динаміку твердого тіла (в нашому випадку електромагнітного поршня), скористаємося фізичним інтерфейсом Global ODEs and DAEs з групи матеріматіческіх інтерфейсів COMSOL Multiphysics. Рівняння руху електромагнітного поршня, прикріпленого знизу до пружини з жорсткістю, k, і до демпфера з коефіцієнтом загасання, D, має такий вигляд:
(1)
M \ frac {d ^ 2p} {dt ^ 2} + D \ frac {dp} {dt} + kp-F_z (p, v, t) = 0
де p - це положення поршня по осі z, v - швидкість, M - маса поршня, F_z (p, v, t) - електромагнітна сила, що діє на поршень (проти пружини). Наведене вище рівняння (другого порядку) можна записати, як два роздільних диференціальних рівнянь (першого порядку) для положення поршня і його швидкості:
(2)
M \ frac {dv} {dt} + Dv + kp-F_z (p, v, t) = 0
і
(3)
\ Frac {dp} {dt} -v = 0
Дані рівняння ми запишемо в фізичному інтерфейсі Global ODEs and DAEs, в якому додамо два окремих вузла global equations (глобальні рівняння), як показано нижче.
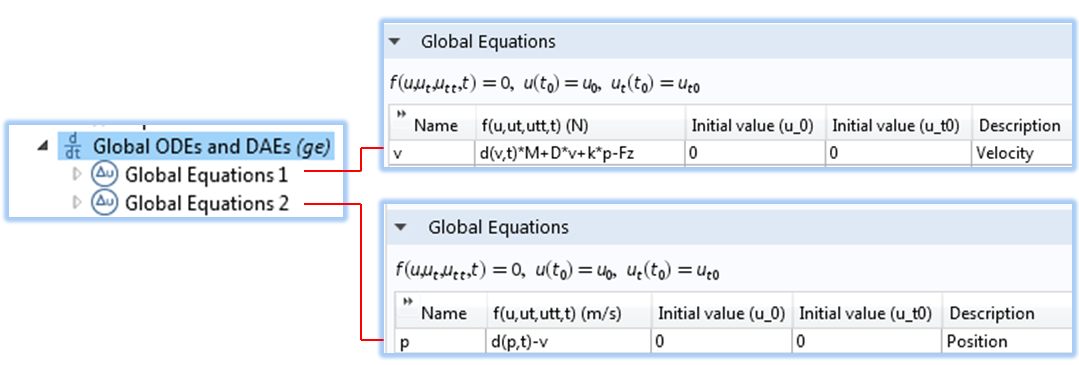
Реалізація двох диференціальних рівнянь, що описують рух і положення поршня, в фізичному інтерфейсі Global ODEs and DAEs.
Моделювання поступального руху поршня
Для моделювання поступального руху електромагнітного поршня додамо інтерфейс Moving Mesh (Рухома сітка). Раніше, в навчальній моделі коливається магніту , Ми вже описували методику того, як застосовувати інтерфейс Moving Mesh тільки до рухомих частин. У нашій моделі - це поршень і область повітря зліва від ідентичною пари. Повітряна область зліва від ідентичною пари для спрощення налаштування рухомий сітки розділена на три секції. Сітка у верхній і нижній повітряних областях буде зроблена деформирующейся, тобто "розширюється" або "сжимающейся", а в середній області розподіл буде фіксованим, але при цьому вона буде пересуватися відповідно до заданих умов на кордоні.
Потім додамо вузол Prescribed Mesh Displacement (встановлене зміщення сітки) і поставимо в поле Prescribed z displacement (встановлене зміщення по осі z) змінну p, яка буде визначати положення поршня. Дві вертикальні напрямні, які ми поставили в вибірці Guiding Boundaries, обмежені тільки в напрямку r. Так що у вікні налаштувань знімемо прапорець в полі Prescribed z displacement. На малюнку нижче показано вікно налаштувань фізичного інтерфейсу Moving Mesh.
Примітка: Ми спеціально поставили, що поршень рухається разом з невеликою областю повітря навколо нього. Це спрощує настройку побудови сітки для інтерфейсу Moving Mesh, так як дозволяє використовувати структуровану сітку (типу Mapped) для двох інших повітряних областей. Ми розглянемо і більш складні конфігурації сітки в другій частині даної серії.
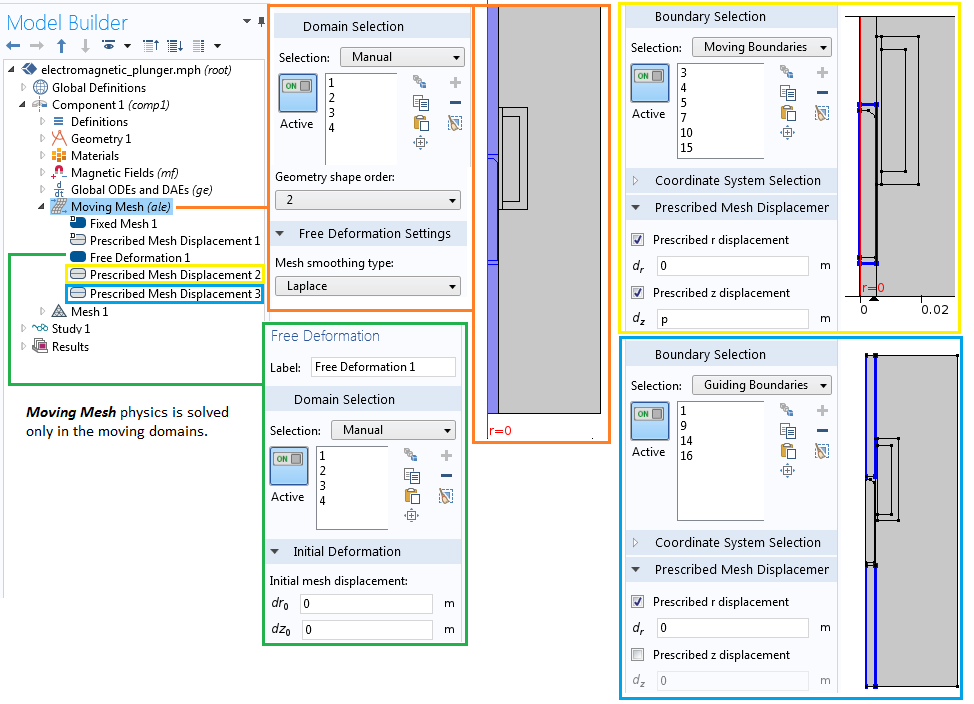
Вікно налаштувань інтерфейсу Moving Mesh (Рухливі сітки).
Є й інший варіант настройки рухомих сіток: нерухомі області задаються в вузлі fixed mesh (фіксована сітка), в той час як рухомі - за допомогою вузлів prescribed deformation (попередньо встановлена деформація) в напрямку осі z, при цьому змінна положення, p, з фізичного інтерфейсу Global ODEs and DAEs визначає задається рух.
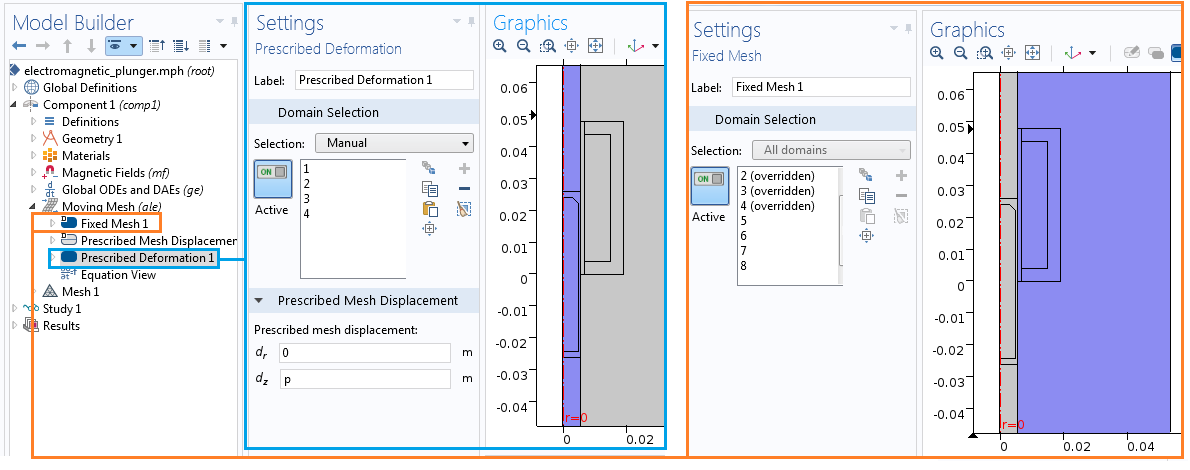
Альтернативний спосіб завдання налаштувань інтерфейсу Moving Mesh.
Аналіз результатів розрахунку
Результати розрахунку в тимчасовій області (time-dependent) електромагнітного поршня можна побачити на графіках нижче. Ми виконали розрахунок для двох різних коефіцієнтів загасання. Як і очікувалося, коливання в системі більше при коефіцієнті затухання меншому, ніж його критичне значення. Проте, час наростання імпульсу коротше.
Графіки положення поршня (зліва) і його електромагнітної сили (праворуч) в залежності від часу для різних коефіцієнтів загасання.
Графіки швидкості поршня в залежності від часу для різних коефіцієнтів загасання (зліва) і струму, що протікає по котушці, в залежності від часу (праворуч).
На анімації нижче показано рух поршня в залежності від протікає в котушці струму. Зліва зображена 3D-анімація динаміки електромагнітного поршня (візуалізується магнітна індукція). Справа представлені анімовані залежності положення поршня і струму, що протікає по котушці, від часу.
Заключетельние міркування з моделювання електромагнітних поршнів і перетворювачів
У цій статті ми крок за кроком розглянули моделювання лінійного / поступального електромагнітного перетворювача з використанням трьох різних фізичних інтерфейсів: Magnetic Fields (Магнітні поля), Moving Mesh (Рухома сітка) і Global ODEs and DAEs. Ми показали, як розраховувати електромагнітну силу, положення поршня і його швидкість, зв'язавши фізичні інтерфейси Magnetic Fields і Moving Mesh і записавши диференціальні рівняння, що описують рух поршня.
Слідкуйте за подальшими публікаціями в нашому корпоративному блозі, щоб дізнатися, як можна ще більше розширити цю динамічну модель поршня за рахунок обліку обмежувачів. У другій частині ми розглянемо, як додати фізичний інтерфейс Events (Події) для моделювання спрацьовування і зупинки електромагнітного поршня.