

- використовуваний кабель
- Стосовно перевірки
- Осцилографування K-CAN, PT-CAN, F-CAN
- Порядок вимірювання опору з согласующим опором K-CAN, PT-CAN і F-CAN
- K-CAN
- PT-CAN, F-CAN
- Вказівка!
- Шина CAN не працює
Наша сеть партнеров Banwar
Це керівництво служить для перевірки розпізнавання правильності подачі сигналу високого рівня CAN і низького рівня CAN на з'єднання з шиною.
використовуваний кабель
кабель для універсального
Стосовно перевірки
- Перевірка напруги (осцилограф): Для перевірки напруги повинна бути приєднана АКБ і включено запалювання.
- Вимірювання опору: Під час вимірювання опору необхідно, щоб вимірюваний об'єкт перед виміром був приведений в знеструмленому стан. Для цього від'єднується акумуляторна батарея. Почекати 3 хвилини поки розрядяться всі конденсатори в системі.
Інформація по шині CAN
Шина CAN (Controller Area Network) є послідовною системою шин зв'язку і відрізняється наступними ознаками:
- поширення сигналу відбувається в обох напрямках.
- Кожне повідомлення приймають всі абоненти шини. Кожен абонент шини сам вирішує, чи буде він використовувати повідомлення,
- Додаткові абоненти шини додаються простим паралельним включенням.
- Шинна система утворює систему з задає пристроєм. Кожен абонент шини може бути задає або виконавчим пристроєм, в залежності від того, чи підключений він в якості передавача або приймача.
- Як засіб передачі використовується двопровідне з'єднання. Позначення проводів: низький рівень CAN і високий рівень CAN.
- Як правило, кожен абонент шини може підтримувати зв'язок по шині з усіма іншими абонентами шини. Обмін даними по шині регулюється за правилами доступу. Основною відмінністю між шиною передачі даних K-CAN (кузовна шина CAN), шиною PT-CAN (шина CAN двигуна і трансмісії) і шиною F-CAN (шина CAN ходової частини) є:
- K-CAN: швидкість передачі даних ок. 100 Кбіт / с. Можливий однопровідною режим.
- PT-CAN: швидкість передачі даних ок. 500 Кбіт / с. Однопровідною режим неможливий.
- F-CAN: швидкість передачі даних ок. 500 Кбіт / с. Однопровідною режим неможливий.
Задає пристрій: задає пристрій є активним партнером по зв'язку, від якого виходить ініціатива зв'язку. Задає пристрій має пріоритет і управляє зв'язком. Воно може посилати пасивного абоненту шини (виконавчому пристрою) повідомлення по системі шин і після запиту приймати його повідомлення.
Виконавчий пристрій: виконавчий пристрій є пасивним учасником зв'язку. Воно отримує команду отримувати і передавати дані.
Система з задає пристроєм: в системі з задає пристроєм учасники зв'язку можуть в певний момент часу брати на себе роль задає або виконавчого пристрою.
Осцилографування K-CAN, PT-CAN, F-CAN
Для більшої ясності, чи працює шина CAN бездоганно, необхідно поспостерігати зв'язок по шині. При цьому немає необхідності аналізувати окремі біти, а потрібно лише переконатися, що шина CAN працює. Осцилографування показує: "шина CAN очевидно працює без порушень".
При вимірюванні за допомогою осцилографа напруги між проводом низького рівня CAN (або високого CAN-High) і масою отримують прямокутний сигнал в межах напруги:
K-CAN:
Низький рівень CAN щодо маси: U хв = 1 В і U макс = 5 В
Високий рівень CAN щодо маси: U хв = 0 В і U макс = 4 В
Ці значення є приблизними і можуть відрізнятися, в залежності від навантаження шини, на величину до 100 мВ.
Налаштування осцилографа для вимірювання на шині K-CAN:
CH1: Щуп 1, ранг 2 В / справ; з'єднання DC CH2: Щуп 2, ранг 2 В / справ; з'єднання DC Час: 50 мс / справ
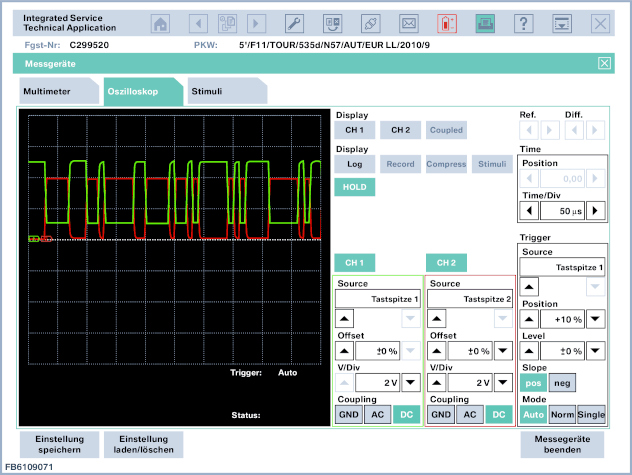
Мал. 1: Вимірювання K-CAN: CH1 низький рівень CAN, CH2 високий рівень CAN
При вимірюванні за допомогою осцилографа напруги між проводом низького рівня CAN (або високого CAN-High) і масою отримують прямокутний сигнал в межах напруги:
PT-CAN і F-CAN
Низький рівень CAN щодо маси: U хв = 1,5 В і U макс = 2,5 В
Високий рівень CAN щодо маси: U хв = 2,5 В і U макс = 3,5 В
Ці значення є приблизними і можуть відрізнятися, в залежності від навантаження шини, на величину до 100 мВ.
Налаштування осцилографа для вимірювання на шині PT-CAN (або F-CAN):
CH1: Щуп 1, ранг 1 В / справ; з'єднання DC CH2: Щуп 2, ранг 1 В / справ; з'єднання DC Час: 10 мс / справ 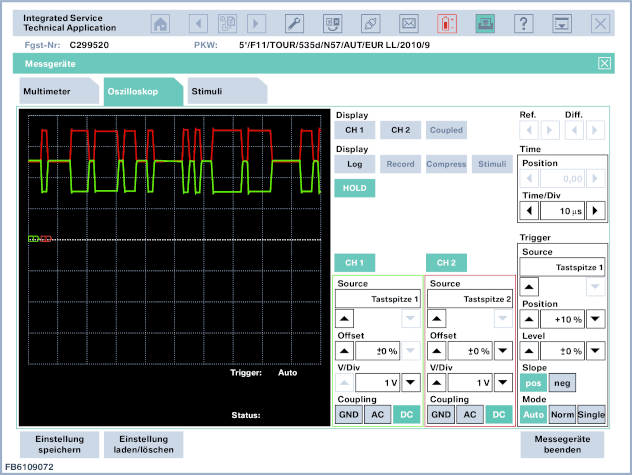
Малюнок 2: Вимірювання PT-CAN: CH1 низький рівень CAN, CH2 високий рівень CAN
Порядок вимірювання опору з согласующим опором K-CAN, PT-CAN і F-CAN
Процес перевірки вимірювання опору:
- Шина CAN повинна знаходитися в знеструмленому стані
- Чи не повинні бути підключені інші вимірювальні прилади (паралельне включення вимірювальних приладів)
- Вимірювання проводиться між проводами низького рівня CAN і високого рівня CAN
- Фактичні значення можуть відрізнятися від заданих значень на кілька Ом.
K-CAN
На шині K-CAN можна провести окреме вимірювання опору, так як опір змінюється в залежності від логіки включення ЕБУ!
PT-CAN, F-CAN
Для запобігання відображення сигналу два абонента шини CAN (з максимальним віддаленням в мережі PT-CAN) навантажуються опором 120 Ом. Обидва навантажувальних опору включаються паралельно і утворюють еквівалентний опір 60 Ом. При відключеному напрузі живлення це еквівалентний опір можна виміряти між лініями передачі даних. Крім цього, можна окремо виміряти окремі опору.
Вказівки по вимірюванню з опором 60 Ом: Завершити з'єднання від шини легкодоступний ЕБУ. Виміряти опір на роз'ємі між проводами CAN низького і високого рівнів.
Вказівка!
Чи не на всіх автомобілях є згода опір на шині CAN Наявність вбудованого узгоджувального опору на підключеному автомобілі можна перевірити за відповідною електричній схемі.
Шина CAN не працює
Якщо шина передачі даних K-CAN або PT-CAN не працює, то, можливо, є КЗ або обрив проводу CAN високого або низького рівнів. Або несправний ЕБУ.
Для локалізації причини несправності рекомендується діяти таким чином:
- По черзі від'єднувати абонентів шини CAN до тих пір, поки не буде знайдений блок, який є причиною несправності (= ЕБУ X).
- Перевірити дроти до ЕБУ X на відсутність КЗ або обриву.
- При можливості перевірити ЕБУ X.
- Така послідовність дій призводить до успіху тільки в тому випадку, якщо коротке замикання має перевіряється провід від ЕБУ до шини CAN. Якщо провід в шині CAN сам має коротке замикання, то потрібно перевірити джгут проводів.
Ми залишаємо за собою право на помилки, смислові помилки і технічні зміни.